Yer Değiştirme ve Yer Değiştirici Seviye Ölçüm Cihazları
Displacement and Displacer Level Instrumentation
Displacer level instruments exploit Archimedes’ Principle to detect liquid level by continuously measuring the weight of an object (called the displacer) immersed in the process liquid. As liquid level increases, the displacer experiences a greater buoyant force, making it appear lighter to the sensing instrument, which interprets the loss of weight as an increase in level and transmits a proportional output signal.
Displacer level instruments
In practice a displacer level instrument usually takes the following form. Process piping in and out of the vessel has been omitted for simplicity – only the vessel and its displacer level instrument are shown:
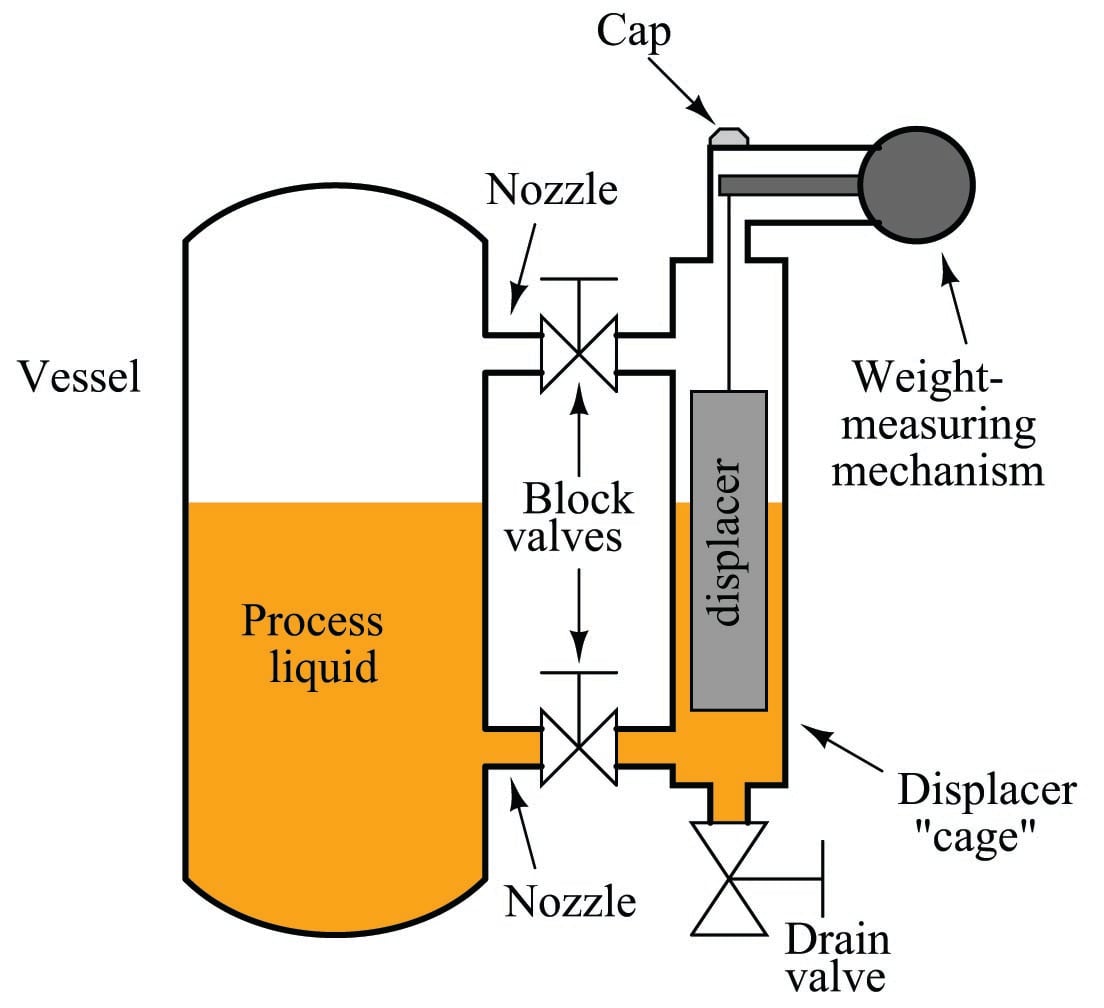
Displacer level instruments itself is usually a sealed metal tube, weighted sufficiently so it cannot float in the process liquid. It hangs within a pipe called a “cage” connected to the process vessel through two block valves and nozzles. These two pipe connections ensure the liquid level inside the cage matches the liquid level inside the process vessel, much like a sightglass.
If liquid level inside the process vessel rises, the liquid level inside the cage rises to match. This will submerge more of the displacer’s volume, causing a buoyant force to be exerted upward on the displacer. Remember that the displacer is too heavy to float, so it does not “bob” on the surface of the liquid nor does it rise the same amount as the liquid’s level – rather, it hangs in place inside the cage, becoming “lighter” as the buoyant force increases. The weight-sensing mechanism detects this buoyant force when it perceives the displacer becoming lighter, interpreting the decreased (apparent) weight as an increase in liquid level. The displacer’s apparent weight reaches a minimum when it is fully submerged, when the process liquid has reached the 100% point inside the cage.
It should be noted that static pressure inside the vessel will have negligible effect on a displacer instrument’s accuracy. The only factor that matters is the density of the process fluid, since buoyant force is directly proportional to fluid density (
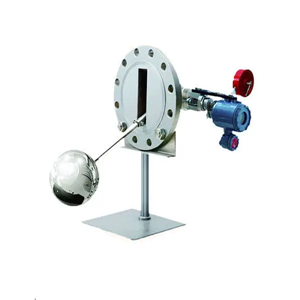
The following photograph shows a Fisher “Level-Trol” model pneumatic transmitter measuring condensate level in a knockout drum for natural gas service. The instrument itself appears on the right-hand side of the photo, topped by a grey-colored “head” with two pneumatic pressure gauges visible. The displacer “cage” is the vertical pipe immediately behind and below the head unit. Note that a sightglass level gauge appears on the left-hand side of the knockout chamber (or condensate boot) for visual indication of condensate level inside the process vessel:

Bu özel yer değiştirme ölçüm cihazının amacı, "kılıf" içinde biriken yoğuşma sıvısının miktarını ölçmektir. Fisher Level-Trol'ün bu modeli, yoğuşmayı kılıftan otomatik olarak boşaltmak için bir tahliye vanasına hava basıncı sinyali gönderen pnömatik bir kontrol mekanizmasıyla birlikte gelir.
Burada, Level-Trol yer değiştirme cihazının sökülmüş halini gösteren iki fotoğraf yer alıyor ve yer değiştirme cihazının kafes borusunun içine nasıl oturduğunu gösteriyor:


Kafes borusu, proses kabına iki blok vana vasıtasıyla bağlanarak prosesten izole edilmesini sağlar. Bir tahliye vanası, alet bakımı ve sıfır kalibrasyonu için kafesin proses sıvısından boşaltılmasına olanak tanır.
Bazı yer değiştirme tipi seviye sensörleri kafes kullanmaz, bunun yerine yer değiştirme elemanını doğrudan proses kabına asar. Bunlara "kafessiz" sensörler denir. Kafessiz cihazlar elbette kafesli cihazlardan daha basittir, ancak bulundukları proses kabının basıncını düşürmeden (ve hatta boşaltmadan) bakımları yapılamaz. Ayrıca, kabın içindeki sıvı, kabın içine ve dışına yüksek akış hızları veya proses sıvısının iyice karıştırılmasını sağlamak için kaba yerleştirilmiş motorlu pervanelerin hareketiyle çalkalanırsa, ölçüm hatalarına ve "gürültüye" karşı hassastırlar.
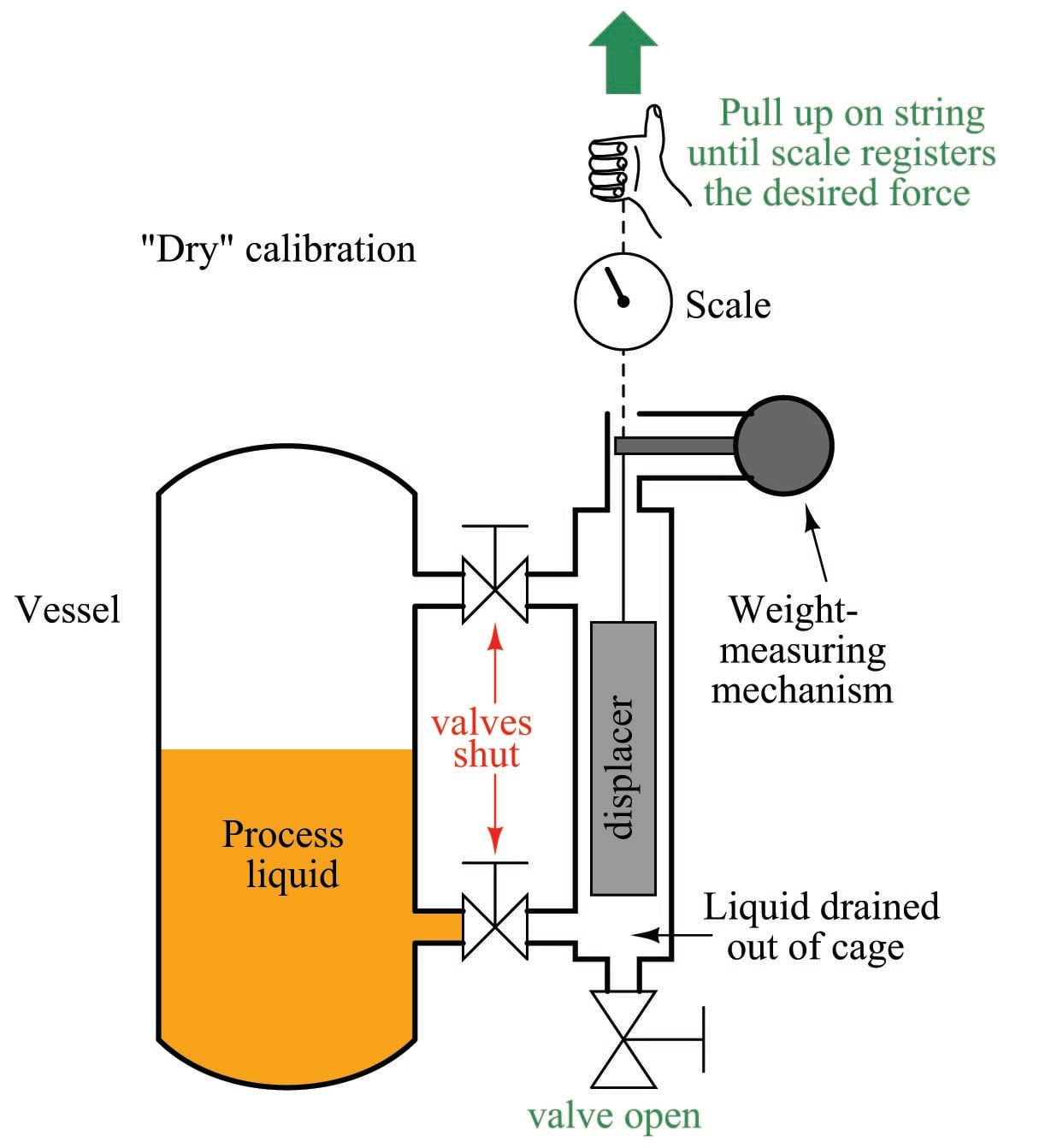
Kafesin proses sıvısıyla (a) doldurulması yoluyla tam aralık kalibrasyonu gerçekleştirilebilir. ıslak kalibrasyon) veya yer değiştiriciyi bir ip ve hassas bir ölçekle asarak (bir kuru kalibrasyon), %100 sıvı seviyesinde kaldırma kuvvetini simüle etmek için yer değiştiriciyi tam doğru miktarda yukarı çekmek:
Bu kaldırma kuvvetinin hesaplanması oldukça basittir. Arşimet Prensibine göre, kaldırma kuvveti her zaman yer değiştiren sıvı hacminin ağırlığına eşittir. Tam aralıkta çalışan bir yer değiştirici tabanlı seviye ölçüm cihazında, bu genellikle yer değiştirici elemanın tüm hacminin sıvıya batırıldığı anlamına gelir. Yer değiştiricinin hacmini hesaplamanız yeterlidir (eğer silindir ise,
Örneğin, işlem sıvısının ağırlık yoğunluğu fit küp başına 57,3 pound ise ve yer değiştirici 3 inç çapında ve 24 inç uzunluğunda bir silindir ise, tam seviyede kaldırma kuvveti durumunu simüle etmek için gerekli kuvvet aşağıdaki gibi hesaplanabilir:
Birimlerin tutarlılığının ne kadar önemli olduğuna dikkat edin! Sıvı yoğunluğu, pound/kübik inç biriminde verilmiştir. ayak ve yer değiştiricinin boyutları inçBu durum, ayak ve inç arasında bir dönüşüm yapılmasaydı ciddi sorunlara yol açardı. Örnek çalışmamda, yoğunluğu inç küp başına pound birimine dönüştürmeyi tercih ettim, ancak yer değiştirici boyutlarını ayak birimine dönüştürerek yer değiştirici hacmini fit küp biriminde elde etmek de aynı derecede kolay olurdu.
"Islak" kalibrasyonda, 5,63 poundluk kaldırma kuvveti sıvının kendisi tarafından oluşturulur; teknisyen, kafesin içinde %100 seviye koşulunu simüle etmek için yeterli sıvı olduğundan emin olur. "Kuru" kalibrasyonda ise, kaldırma kuvveti, bir el terazisi ve ip kullanılarak yukarı doğru uygulanan gerilimle simüle edilir; teknisyen, aletin aslında tamamen kuru ve havada asılı olmasına rağmen %100 sıvı seviyesini algıladığını "düşünmesini" sağlamak için 5,63 poundluk yukarı doğru bir kuvvet uygular.
Tork tüpleri Hoşnutsuzluk seviye aletleri
Yer değiştirme tipi seviye transmitterleri için ilginç bir tasarım problemi, yer değiştiricinin algılanan ağırlığını transmitter mekanizmasına aktarırken aynı zamanda proses buhar basıncını bu mekanizmadan pozitif olarak nasıl izole edeceğimizdir. Bu probleme en yaygın çözüm, dahiyane bir mekanizma olan "yer değiştirme mekanizması"dır. tork borusuNe yazık ki, tork tüplerini anlamak, doğrudan uygulamalı olarak inceleme fırsatınız olmadığı sürece oldukça zor olabilir; bu nedenle bu bölümde, referans kılavuzlarında genellikle bulunandan daha ayrıntılı bir şekilde bu kavram ele alınacaktır.
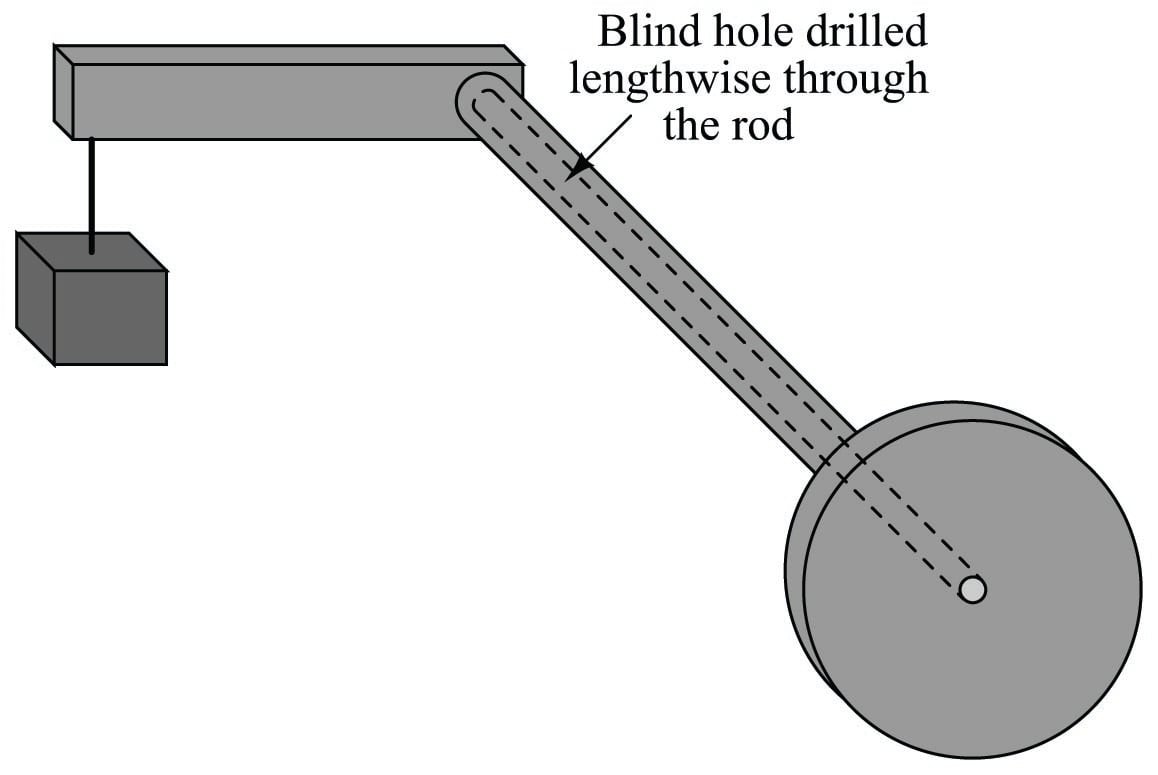
Bir ucunda flanş, diğer ucunda ise dik bir kaldıraç bulunan, yatay, katı bir metal çubuk hayal edin. Flanş sabit bir yüzeye monte edilmiş ve kaldıraçın ucundan bir ağırlık asılıdır. Kesik çizgili daire, çubuğun flanşın merkezine kaynaklandığı yeri göstermektedir:
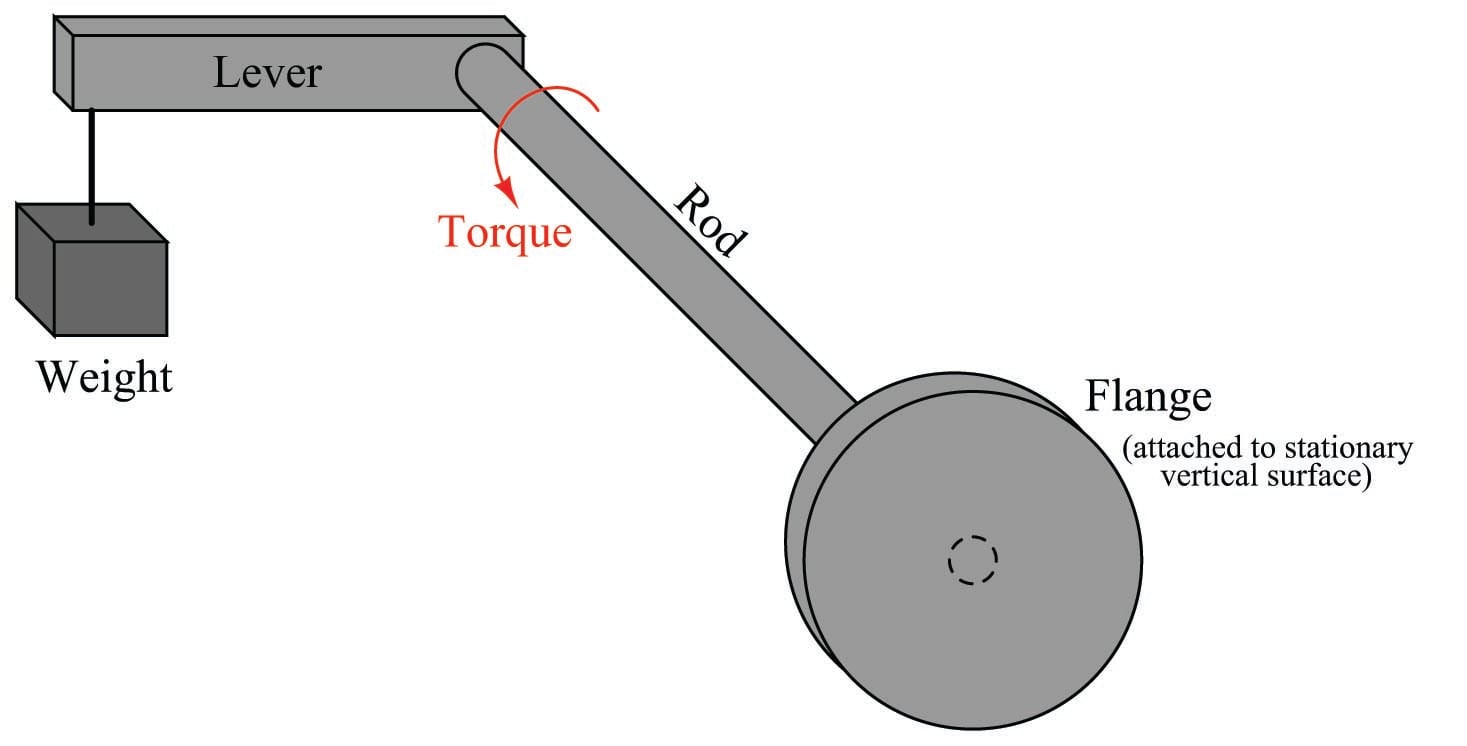
Kaldıraç üzerine etki eden ağırlığın aşağı doğru kuvveti, çubuğa bir burulma kuvveti (tork) uygulayarak, çubuğun uzunluğu boyunca hafifçe bükülmesine neden olur. Kaldıraç ucuna ne kadar fazla ağırlık asılırsa, çubuk o kadar fazla bükülür. Ağırlık ve kaldıraç tarafından uygulanan tork, çubuğun elastik sınırını asla aşmadığı sürece, çubuk bir yay gibi davranmaya devam edecektir. Çubuğun "yay sabiti"ni biliyorsak ve burulma sapmasını ölçtüysek, bu hafif hareketi kullanarak kaldıraç ucuna asılan ağırlığın büyüklüğünü ölçebiliriz.
Yer değiştirme tipi bir seviye ölçme cihazında, kaldıraç ucundaki ağırlığın yerini bir yer değiştirici çubuk alır ve bu çubuğun burulma sapması kaldırma kuvvetini gösterir. Sıvı yükseldikçe, yer değiştirici çubuk üzerindeki kaldırma kuvveti artar ve bu da çubuğun bakış açısından yer değiştirici çubuğun daha hafif görünmesine neden olur. Bu görünür ağırlık değişiminden kaynaklanan çubuğun hafif hareketi, sıvı seviyesini gösterir.
Şimdi, çubuğun uzunlamasına, neredeyse kolun takıldığı uca kadar uzanan uzun bir delik açtığınızı hayal edin. Başka bir deyişle, şunu hayal edin: kör delik Çubuğun merkezinden, flanştan başlayıp kolun hemen öncesinde sona eren bir kesit:
Bu uzun deliğin varlığı, çubuğun yay sabitini değiştirmek dışında, düzeneğin davranışında pek bir değişiklik yaratmaz. Daha az katı metal ile çubuk daha zayıf bir yay olacak ve kaldıraç ucuna uygulanan ağırlıkla daha fazla bükülecektir. Ancak bu tartışma açısından daha önemlisi, uzun delik çubuğu bir şeye dönüştürür. tüp Ucu kapalı. "Burulma çubuğu" yerine, çubuk artık daha doğru bir şekilde şu şekilde adlandırılıyor: tork borusuKaldıraçın ucuna uygulanan ağırlıkla çok az da olsa dönme hareketi meydana geliyor.
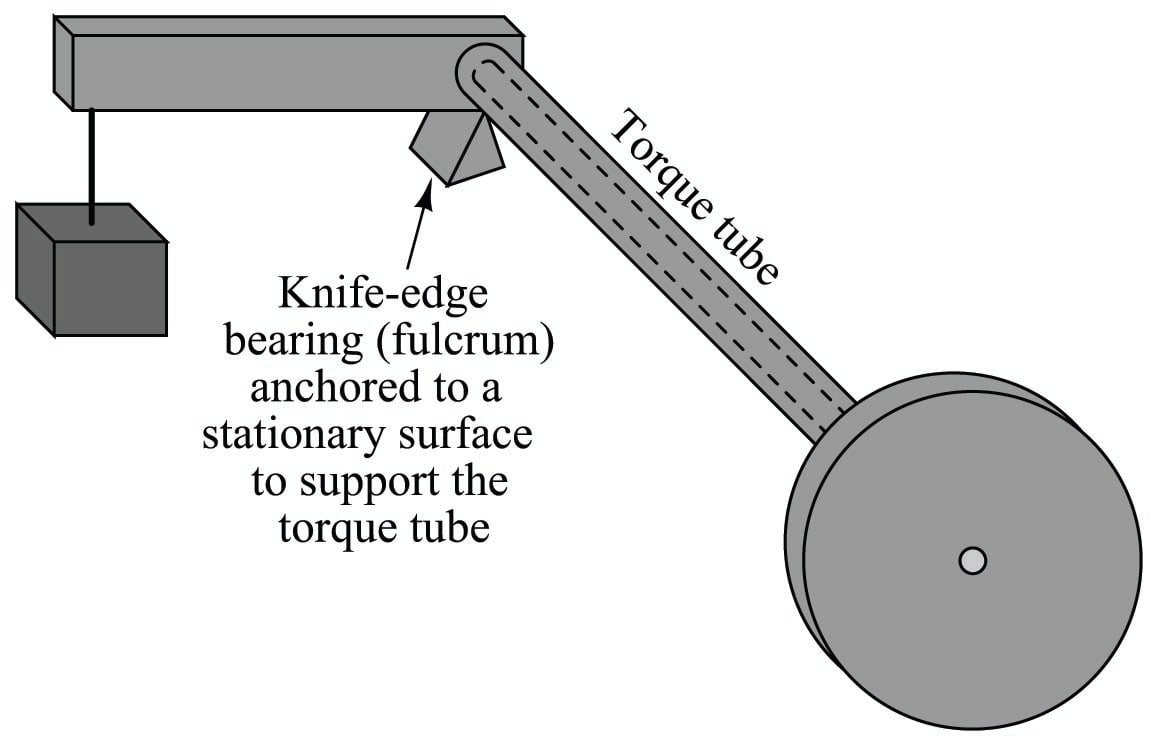
Tork borusunun uygulanan ağırlık altında aşağı doğru sarkmasını önlemek için dikey destek sağlamak amacıyla, bir destekleyici eleman gereklidir. bıçak ağzı yatağı Genellikle kaldıraç kolunun tork borusuna bağlandığı ucun altına yerleştirilir. Bu destek noktasının amacı, ağırlığa dikey destek sağlarken neredeyse sürtünmesiz bir dönme noktası oluşturarak tork borusuna uygulanan tek gerilimin bu şekilde olmasını sağlamaktır. tork koldan:
Son olarak, kör deliğin uzak ucuna, flanşın ucundan dışarı doğru uzanan (delikten biraz daha küçük çaplı) başka bir katı metal çubuk kaynaklandığını hayal edin:
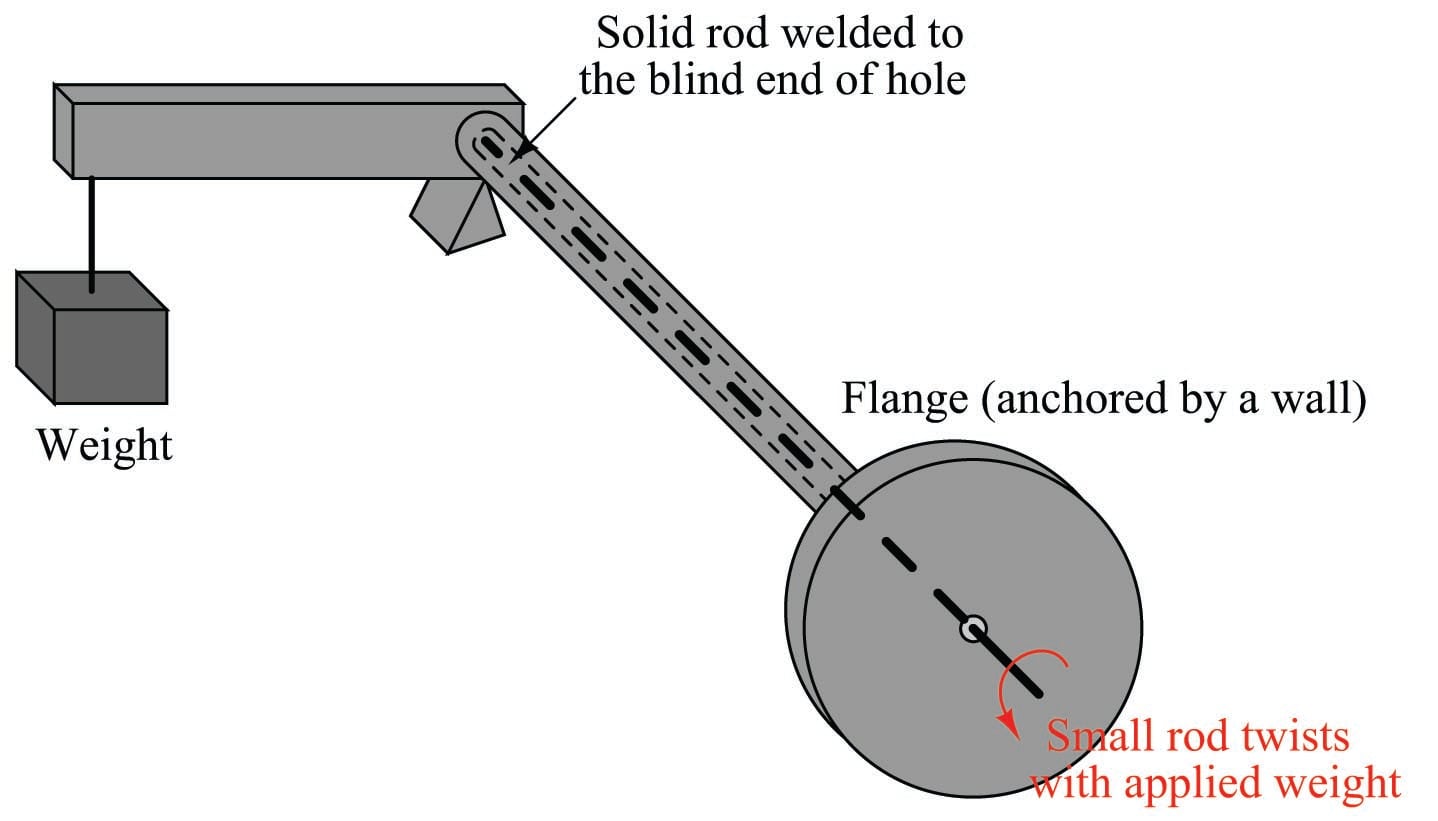
Bu daha küçük çaplı çubuğun amacı, tork borusunun uzak ucundaki dönme hareketini, algılanabileceği flanşın ötesindeki bir noktaya aktarmaktır. Flanşın dikey bir duvara sabitlendiğini ve değişken bir ağırlığın kaldıraç ucundan aşağı doğru çektiğini hayal edin. Tork borusu, değişken kuvvetle birlikte dönme hareketiyle esneyecektir, ancak şimdi duvarın yakın tarafındaki daha küçük çubuğun dönüşünü izleyerek ne kadar döndüğünü görebiliyoruz. Ağırlık ve kaldıraç bu duvar tarafından tamamen görüşümüzden gizlenmiş olabilir, ancak küçük çubuğun dönme hareketi yine de tork borusunun ağırlığın kuvvetine ne kadar boyun eğdiğini ortaya koymaktadır.
Bu tork tüpü mekanizmasını, basınçlı bir kaptaki sıvı seviyesini ölçme görevine uygulayabiliriz; bunun için ağırlığı bir yer değiştirici ile değiştirir, flanşı kaba kaynaklanmış bir nozüle takar ve hareket algılama cihazını küçük çubuk ucuyla hizalayarak dönüşünü ölçeriz. Sıvı seviyesi yükselip alçaldıkça, yer değiştiricinin görünen ağırlığı değişir ve bu da tork tüpünün hafifçe bükülmesine neden olur. Bu hafif bükülme hareketi daha sonra, proses sıvısı basıncından izole edilmiş bir ortamda, küçük çubuğun ucunda algılanır.
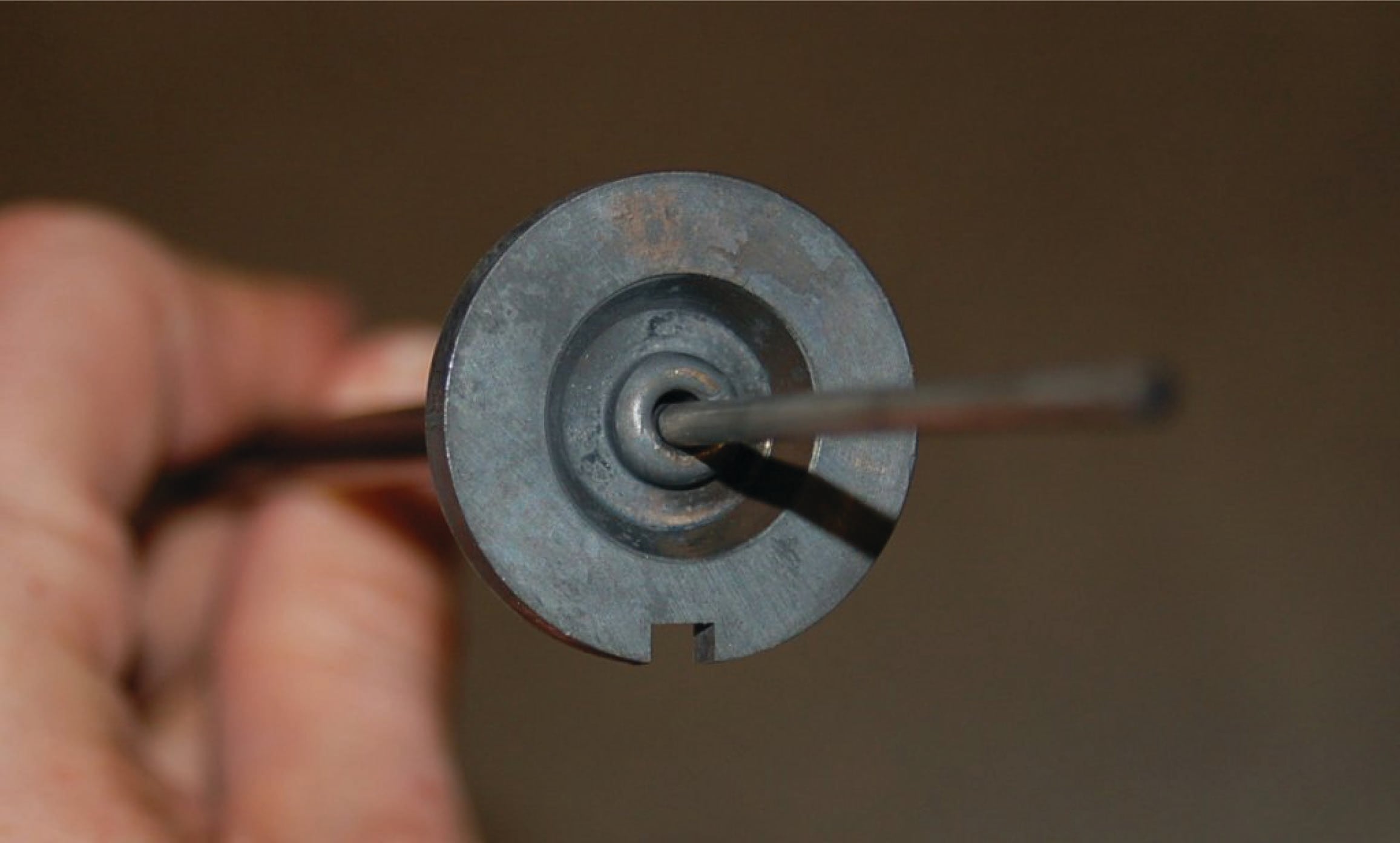
Fisher marka "Level-Trol" seviye vericisinden alınan gerçek bir tork tüpünün fotoğrafı, dış görünümünü göstermektedir:

Koyu renkli metal, burulma yayı görevi görerek ağırlığı askıya alan elastik çeliktir; parlak kısım ise hareketi iletmek için kullanılan iç çubuktur. Gördüğünüz gibi, tork borusunun çapı çok geniş değildir. Eğer öyle olsaydı, yer değiştirici tip bir seviye aletinde pratik kullanım için çok sert bir yay olurdu, çünkü yer değiştirici genellikle çok ağır değildir ve kol uzun değildir.
Tork borusunun her iki ucuna daha yakından bakıldığında, küçük çaplı çubuğun dışarı çıktığı açık uç (solda) ve borunun kola bağlandığı "kör" uç (sağda) görülmektedir:

Tork borusu tertibatını uzunlamasına ikiye bölersek, kesiti yaklaşık olarak şöyle görünür:

Aşağıdaki çizim, tork borusunu, yer değiştirme tipi bir seviye transmitterinin bir parçası olarak göstermektedir:
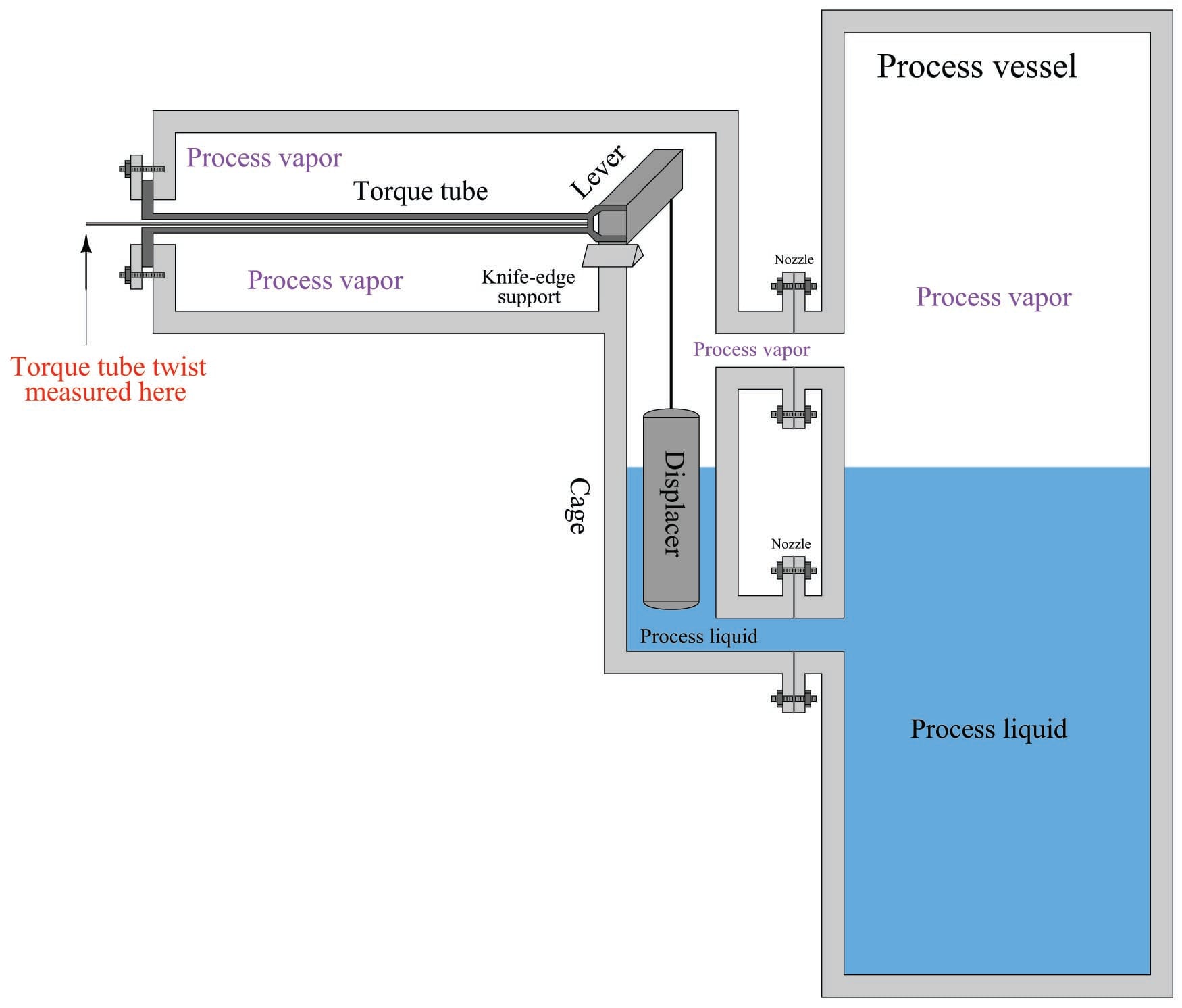
Bu çizimden de görebileceğiniz gibi, tork tüpü, yer değiştirici tipinde bir seviye ölçüm uygulamasında kullanıldığında üç farklı amaca hizmet eder: (1) yer değiştiricinin ağırlığını askıya alan bir burulma yayı görevi görmek, (2) proses sıvısı basıncını konum algılama mekanizmasından izole etmek ve (3) tork tüpünün uzak ucundan algılama mekanizmasına hareket aktarmak.
Pnömatik seviye transmitterlerinde, tork tüpünün dönme hareketini pnömatik (hava basıncı) sinyale dönüştürmek için kullanılan algılama mekanizması tipik olarak şöyledir: hareket-denge Örneğin, Fisher Level-Trol mekanizması, küçük bir çubuğa bağlı bir bölmeyi takip etmek için ucunda bir nozul bulunan C şeklinde bir bourdon tüpü kullanır. Bourdon tüpünün merkezi, tork tüpünün merkeziyle hizalanmıştır. Çubuk döndükçe, bölme bourdon tüpünün ucundaki nozula doğru ilerler ve bu da geri basıncın artmasına neden olur; bu da bourdon tüpünün esnemesine yol açar. Bu esneme, dengeli bir durum oluşana kadar nozulu ilerleyen bölmeden uzaklaştırır. Bu nedenle, çubuk hareketi bourdon tüpü hareketiyle dengelenir ve bu da onu hareket-denge pnömatik sistemi yapar.

Yer değiştirme arayüz seviyesi ölçümü
Yer değiştirme seviye ölçüm cihazları, hidrostatik basınç ölçüm cihazlarıyla aynı şekilde sıvı-sıvı arayüzlerini ölçmek için kullanılabilir. Önemli bir gereklilik, yer değiştirme cihazının her zaman tamamen suya batırılmış ("doldurulmuş") olmasıdır. Bu kural ihlal edilirse, cihaz düşük (toplam) sıvı seviyesi ile düşük arayüz seviyesi arasında ayrım yapamaz. Bu kriter, sıvı-sıvı arayüz seviyelerini ölçmek için kullanılan kompanzasyonlu bacak diferansiyel basınç ölçüm cihazlarına benzer: cihazın yalnızca arayüz seviyesindeki değişikliklere yanıt vermesi ve toplam sıvı seviyesindeki değişikliklerden "aldamaması" için, her iki proses bağlantı noktasının da suya batırılmış olması gerekir.
Eğer yer değiştirme cihazının kendine ait bir "kafesi" varsa, kafesi proses kabına bağlayan her iki borunun (bazen "meme" olarak da adlandırılır) da suya batırılmış olması önemlidir. Bu, kafes içindeki sıvı arayüzünün, kabın içindeki arayüzle eşleşmesini sağlar. Üst meme kurursa, kafesli yer değiştirme cihazında da "gözetim camı" seviye göstergesinde olduğu gibi aynı sorun ortaya çıkabilir (bkz. bölüm). [arayüz_sorunu] (Bu sorunun ayrıntılı açıklaması için sayfa 1'den itibaren devam etmektedir.)
İki sıvının birleşiminden kaynaklanan, yer değiştirici bir eleman üzerindeki kaldırma kuvvetini hesaplamak, göründüğü kadar zor değildir. Arşimet Prensibi hala geçerlidir: kaldırma kuvveti, yer değiştiren sıvıların ağırlığına eşittir. Kaldırma kuvvetini hesaplamak için tek yapmamız gereken, yer değiştiren sıvıların toplam ağırlıklarını ve hacimlerini hesaplamaktır. Tek bir sıvı için kaldırma kuvveti, o sıvının ağırlık yoğunluğuna eşittir (
İki sıvının bir arada bulunduğu bir arayüzde, kaldırma kuvveti, yer değiştiren iki sıvının ağırlıklarının toplamına eşittir; her bir sıvı ağırlığı terimi, o sıvının ağırlık yoğunluğunun, yer değiştiren hacmiyle çarpımına eşittir:
Kesit alanının uzunluğu boyunca sabit olduğunu varsayarsak, her bir sıvının yer değiştirmesi için hacim, aynı alana eşittir (
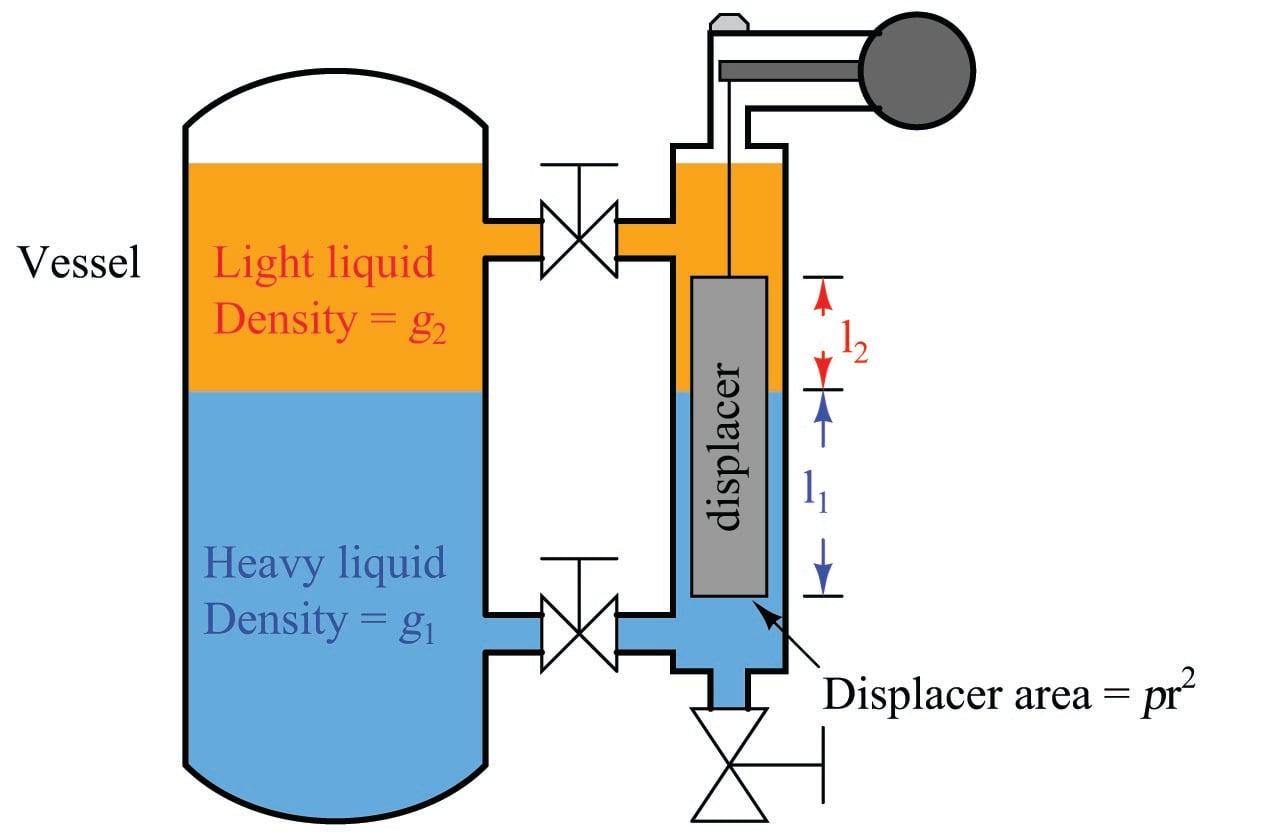
Bölge (
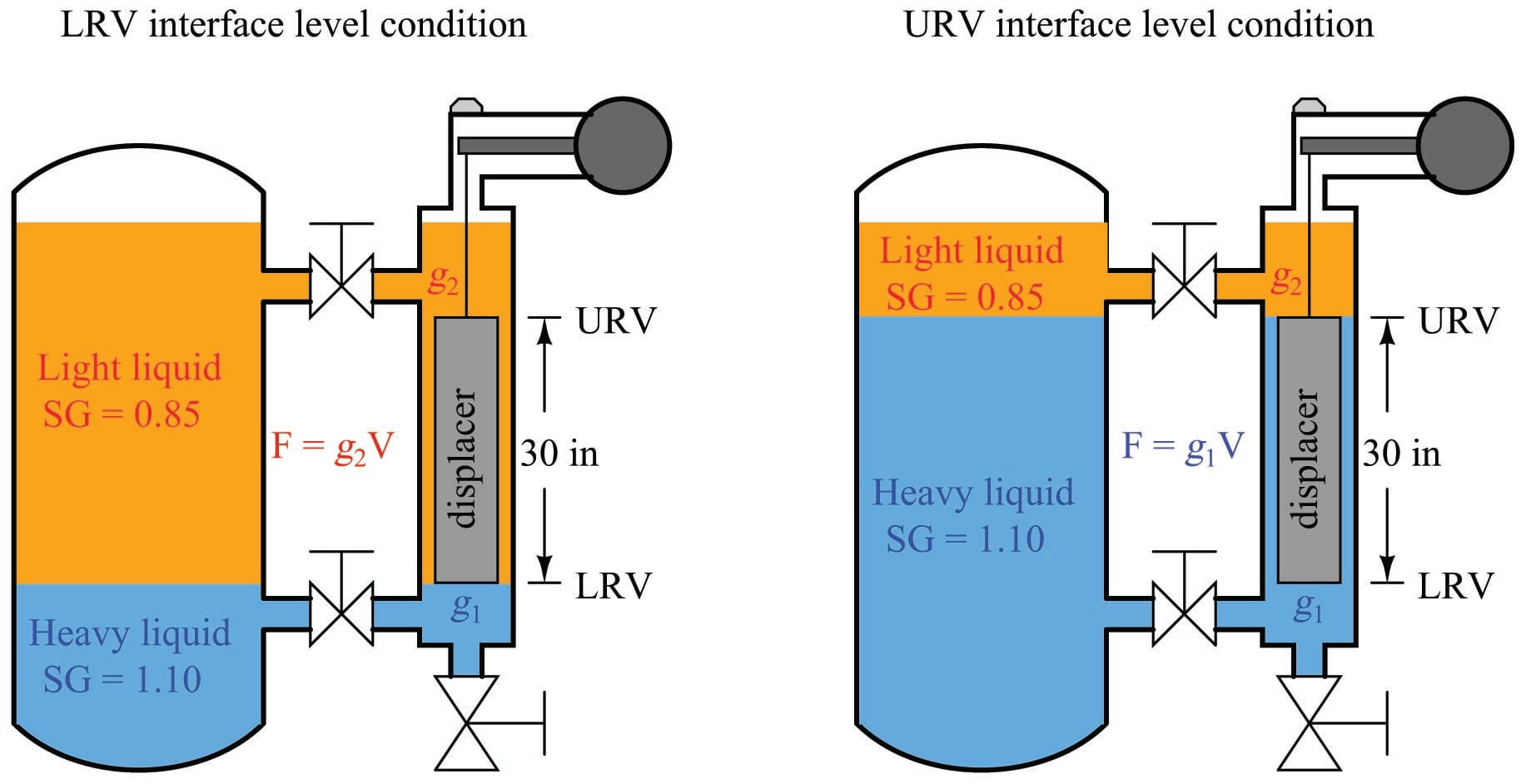
Arayüz uygulamaları için yer değiştirme tipi bir seviye ölçüm cihazının kalibrasyon noktalarının belirlenmesi, LRV ve URV koşulları, hidrostatik arayüz seviye ölçümünde yaptığımız gibi bir çift "düşünce deneyi" olarak incelendiğinde nispeten kolaydır. İlk olarak, arayüzün alt aralık değerinde olduğu durumda yer değiştiricinin durumunun "nasıl görüneceğini" hayal ediyoruz, ardından arayüzün üst aralık değerinde olduğu farklı bir senaryoyu hayal ediyoruz. Her senaryonun çizimlerinin yapılması, açıklık sağlamak için önerilir.
Özgül ağırlıkları 0,850 ve 1,10 olan iki sıvı arasındaki arayüz seviyesini ölçen, uzunluğu 30 inç ve çapı 2,75 inç (yarıçap = 1,375 inç) olan bir yer değiştirme aletimiz olduğunu varsayalım. Ayrıca, bu durumda LRV'nin arayüzün yer değiştirme aletinin dibinde olduğu nokta, URV'nin ise arayüzün yer değiştirme aletinin üstünde olduğu nokta olduğunu varsayalım. LRV ve URV arayüz seviyelerinin yer değiştirme aletinin uzunluğunun uç noktalarına yerleştirilmesi, LRV ve URV hesaplamalarımızı basitleştirir; çünkü LRV "düşünce deneyi", yer değiştirme aletinin tamamen hafif sıvıya batırılması, URV "düşünce deneyi" ise yer değiştirme aletinin tamamen ağır sıvıya batırılması olacaktır.
LRV'nin kaldırma kuvvetinin hesaplanması:
URV'nin kaldırma kuvvetinin hesaplanması:
Bu varsayımsal örnek için gerçek hesaplamaları gösteriyoruz:
LRV (%0) ve URV (%100) arasındaki herhangi bir ölçüm yüzdesi için kaldırma kuvveti, enterpolasyon yoluyla hesaplanabilir:
| Arayüz seviyesi (inç) | Kaldırma kuvveti (pound) |
|---|---|
| 0 | 5.47 |
| 7.5 | 5.87 |
| 15 | 6.27 |
| 22.5 | 6.68 |
| 30 | 7.08 |